
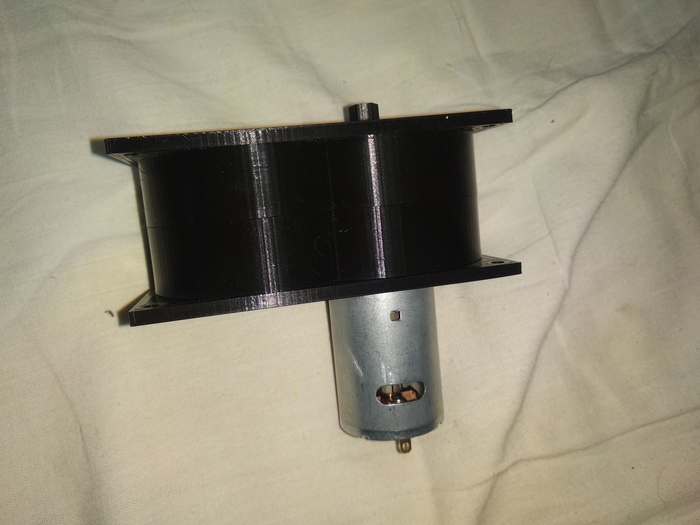
Финальная версия редуктора для мотора 540
Этот редуктор можно собрать с передаточным числом 1/3 , 1/4 , 1/9 , 1/12 , 1/16.
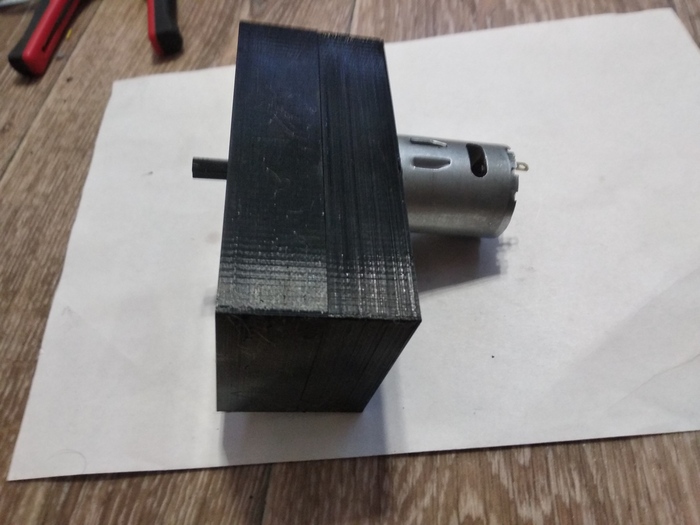
Изменение формы корпуса позволило немного уменьшить габариты и освободить место для крепежных отверстий.Крепежные винты стягивают части корпуса.
Для выходного вала использован подшипник 6700.Он намного меньше чем 608.При этом диаметр выходного вала 10 mm вместо 8.Все остальные подшипники 604.

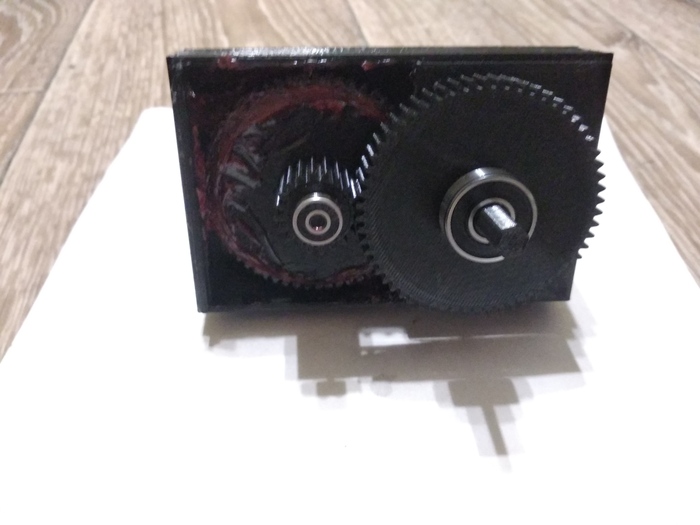
Изначально планировалась возможность сборки 3 ступенчатого редуктора.Но когда получилось сделать передачу 1/4 (15/60) в одну ступень остановился на 2 ступенчатом варианте.
Это упростило конструкцию.Все детали печатаются без поддержек.мосты стали короче.
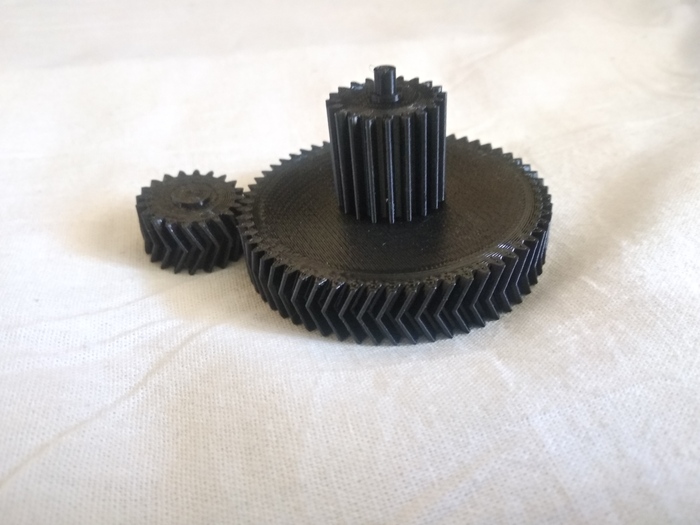
Шестеренки сгенерированы на основе этого scad файла https://www.thingiverse.com/thing:4194148
Все варианты всех печатных деталей.

Основание имеет 3 варианта
base1 мотор находится соосно с выходным валом.расстояние между осями выходного вала и промежуточной шестеренки 40 mm.
base2 мотор сдвинут к промежуточной шестеренке на 2.5 mm.расстояние между осями выходного вала и промежуточной шестеренки 40мм.
base3 мотор находится соосно с выходным валом.расстояние между осями выходного вала и промежуточной шестеренки 37.5 mm.
мотор прикручивается к основанию(base) двумя винтами m3x6 с потайной головкой.на вал мотора напрессовывается шестеренка(motorgear).

В одноступенчатом варианте на основание ставится выходная шестеренка(outgear) и закрывается крышка(cover).с нижней стороны выходной и промежуточной шестеренки углубление для подшипника 604.



В двухступенчатом варианте на основание ставится промежуточная шестеренка(intgear) и закрывается корпусом первой ступени(intcover).на корпус первой ступени ставится выходная шестеренка и закрывается крышкой.в крышке находится верхний подшипник промежуточной шестеренки(604) и подшипник выходного вала(6700).



Необходимые детали для сборки редукторов с разными передаточными числами
1:3 base1 , motorgear1, outgear , cover1 .
1:4 base2 , motorgear2 , outgear , cover1 .
1:9 base1 , motorgear1 , intgear1, intcover1 , outgear , cover1 .
1:12 base2 , motorgear2 , intgear1 , intcover1 , outgear , cover1.
1:16 base3 , motorgear2 , intgear2 , intcover2 , outgear , cover2 .
Старая версия редуктора была шумной из-за большого количества соплей и провисших мостов которые цепляли шестеренку.
Эта версия работает намного тише.
Применение шевронных шестеренок не сделало редуктор еще тише.при этом собирать рудуктор на шевронных шестеренках намного сложнее.
STL и SCAD файлы можно скачать отсюда https://www.thingiverse.com/thing:6637811
Для тестирования под нагрузкой будет собрана колесная платформа и поставлены более мощные моторы для RC машинок.
Показать полностью
12


О градусах, металлической стоматологии и подверстачном мусоре
Хеллоу, уважаемые. Сегодня расскажу хладную былину, как без регистрации и СМС повысить точность и всё такое, шоб получалось хорошо, а не как-нибудь.
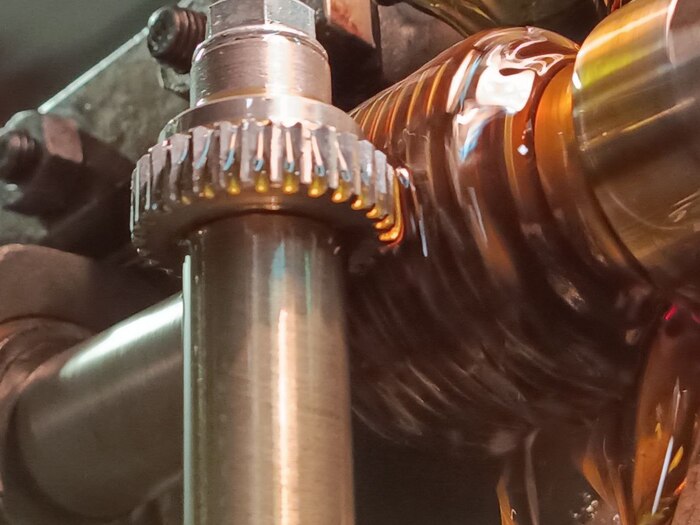
Есть такая штука - зубофрезерный станок высокой точности, называется Pfauter RS-00. Он может резать как прямозубые зубчатые колёса, так и косозубые.
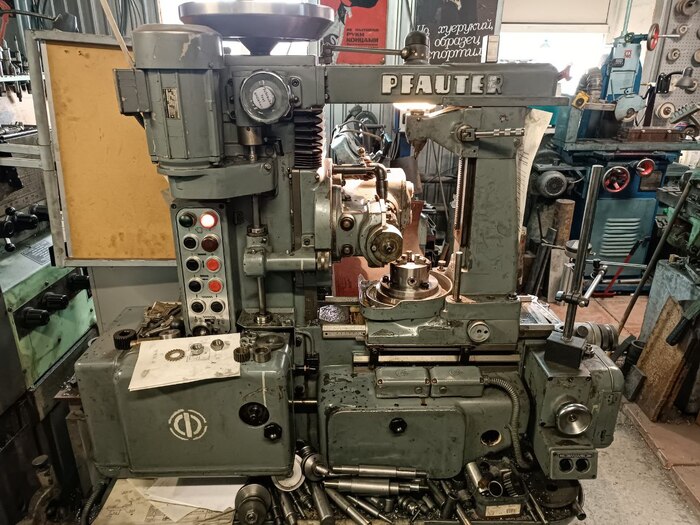
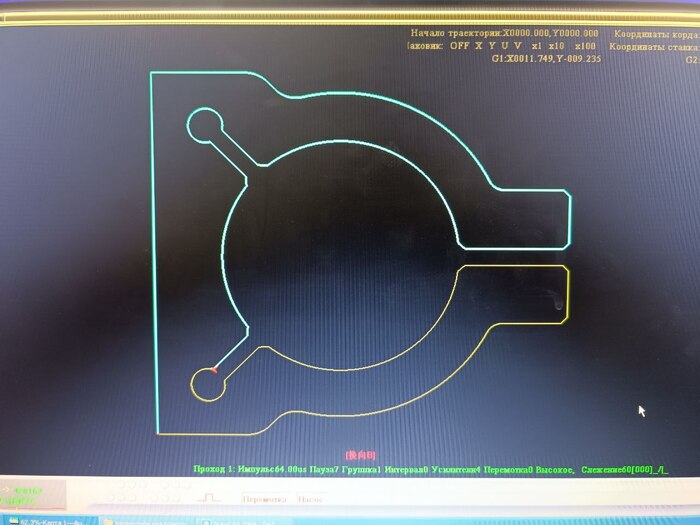
Однако суппорт станка даже при нарезке прямозубых шестерен должен быть наклонён на значение угла, указанного на червячной модульной фрезе. А там обычно что-то типа 3 градуса 18 минут, например. Можно этот угол не выдерживать, конечно... но получится плохо. Например вот так. Слева "правильно", справа - прососан угол наклона. Т.е. зубы есть, но кривые.

Для выставления угла суппорта обычно используется "китайский кубик". Ну а чо, просто и недораха, верно?

Есть только одно "но". Эти и большинство других китайских угломеров размечены в т.н. "новых градусах". Ну т.е. на фрезе указан, например, угол 3 гр. 20 мин., а на кубике 3,20 градуса. А это - разные вещи. Потому как угловая минута это 1\60 градуса, а новая угловая минута - 1\100. Херасе - чуть не в два раза короче! Можно, разумеется, пересчитать все углы в "новые" и посевить шпаргалку на станок... Но тут ещё одна проблема. Эти кубики имеют крайне низкую точность. Если для нарезки зуба типа м2, где глубина врезания 4,5мм и ваще зубы эпическиого размера, это ещё нормально, то модуль типа 0,4 - уже хотелось бы поточнее. Что же делать, спросите вы? Да всё просто. Берём подверстачный мусор, ставим на электроэрозионный проволочновырезной станок.
путём приваривания того и этого, а также шлоского шлифования на скалке на призмах, добиваемся плоскостности привалочной плоскости и её параллельности оси отверстия. Ну и напячиваем сверху Квадрант Оптический КО-1.
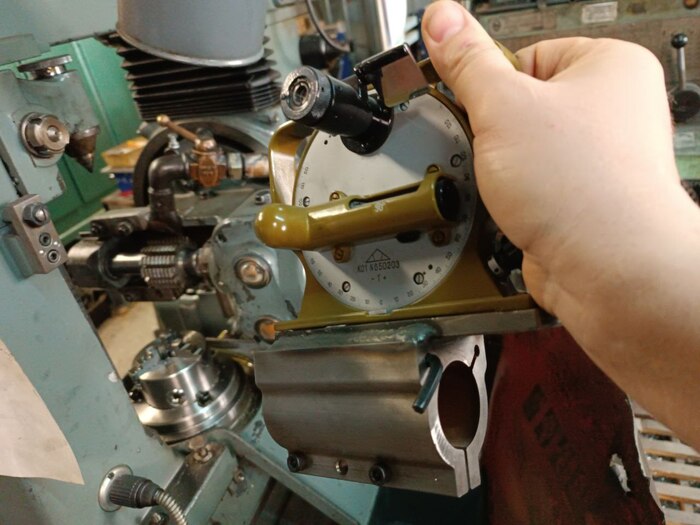
Размещаем сборку на хвосте суппорта... вообще, там желательно иметь маховик... но маховик у меня перенесён на вторую штатную точку крепления - на голову станка. Поэтому хвост свободен. А он точно соосен оси вращения фрезы. А нам только того и надо.

далее крутим морду квадранта пока пузырь не встанет в горизонт (разумеется, предварительно сам станок должен быть выставлен в горизонт по обеим осям с использованием брускового или рамочного станочного уровня с разрешением 0,02мм на метр)... и смотрим внутрь.
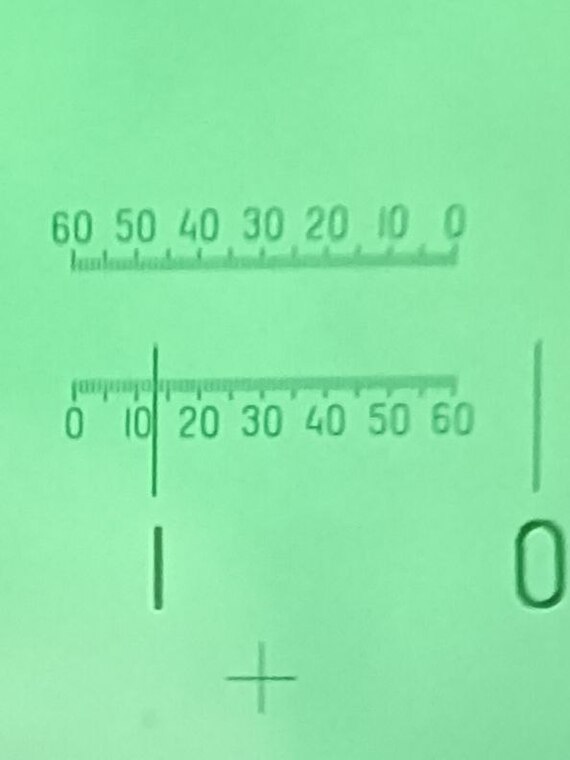
У нас две шкалы. На одной - сколько мы перешли за целый градус, на другой - сколько не дошли до следующего. Иногда удобно. Наебковой техникой (постукиванием резиновой киянкой по корпусу суппорта) выставляем суппорт на нужный угол, затягиваем и...
Чистый мёд! Заготовка крутится, лавэшка мутится. На изображении второй проход, вроде. Я даже мелкие модули режу как минимум в 2 прохода. И станок не напрягается и почище выходит. Кактатак.
Вся эта тема подробно и в онлайне описывается в телегоканале, каковой указан в профиле. Есличо - добро пожаловать.
Показать полностью
8



Наколдовала новых печатей к почтовым коробочкам


Показать полностью
2
Редуктор на 3D принтере.Другая конструкция
Сделал еще один редуктор для мотора R540 33110.
Две ступени с общим передаточным числом 1 к 9.
Ведущая шестеренка насажена на вал мотора.

В месте крепления мотора есть вентиляционные каналы для охлаждения.
Шестеренки вращаются на подшипниках.

Корпус состоит из 3 частей.Ребристые поверхности после печати работают как защелки.

Выходной вал проходит через 608 подшипник.Все остальные подшипники 604.
Первая и вторая ступени одинаковые 20 к 60.
Выходной вал 8мм с шестигранником.
Очень легко сломать если не аккуратно надевать или снимать подшипник.

Шестеренки из PETG с модулем 1 выдерживают работу с этим моторчиком.
Мотор можно остановить и шестерни не слижет.
Этот редуктор получился тише чем предыдущий планетарный.
Если делать редуктор частью другого механизма его можно сделать меньше.
Собираюсь попробовать еще несколько конструкций
{
Червячный с использованием винта TR8,
На зубчатом ремне GT2 с печатным ведомым шкивом,
На конических шестернях.
}
На самой понравившейся конструкции соберу тестовую колесную платформу для робота.
Еще попробую другие моторчики(и не только моторчики).
Детали моделировались в программе OpenSCAD.
Показать полностью
7

Экспериентс завершился успешно

Показать полностью
3